Secondary mission
Our secondary mission is to add to the main can two sub-cans. This will allow us to observe more data over a larger area. A backend will be included in our system on the ground station that will allow us to visualize in real time the data collected by the can (via a web server).
For our secondary mission, we have prepared two designs that once completed will be compared. The best of the two designs will be the one that we will embed in our main can. One of the two projects is the "Drawers" project.
The principle of this design is to eject two sub-cans laterally, each going in an opposite direction to the other. To do this we have imagined a system based on a servo motor and "pins".
Indeed, the main can will be divided into four parts:
- The first one will be dedicated to the computer part of it.
- The second will be dedicated to the ejection compartment of one of the sub-cansat and to the sub-cansat itself.
- The third part will be dedicated to the servo and pin compartment.
- The last one will be dedicated to the second ejection compartment and its sub-cansat.

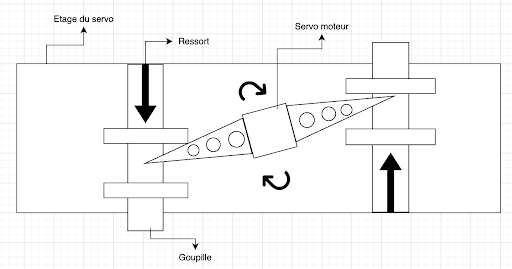
How the pins work:
the pins are used to lock the sub-cans until their ejection. In order to lower these pins, so that the sub-cans can be ejected ( thanks to springs), we use a servo motor. When we rotate the servo motor the pins will be lowered , thus unlocking the sub-cans