Our project
Discover our project: learn more about the specifics of the primary mission as well as the subject of our secondary mission.
System design
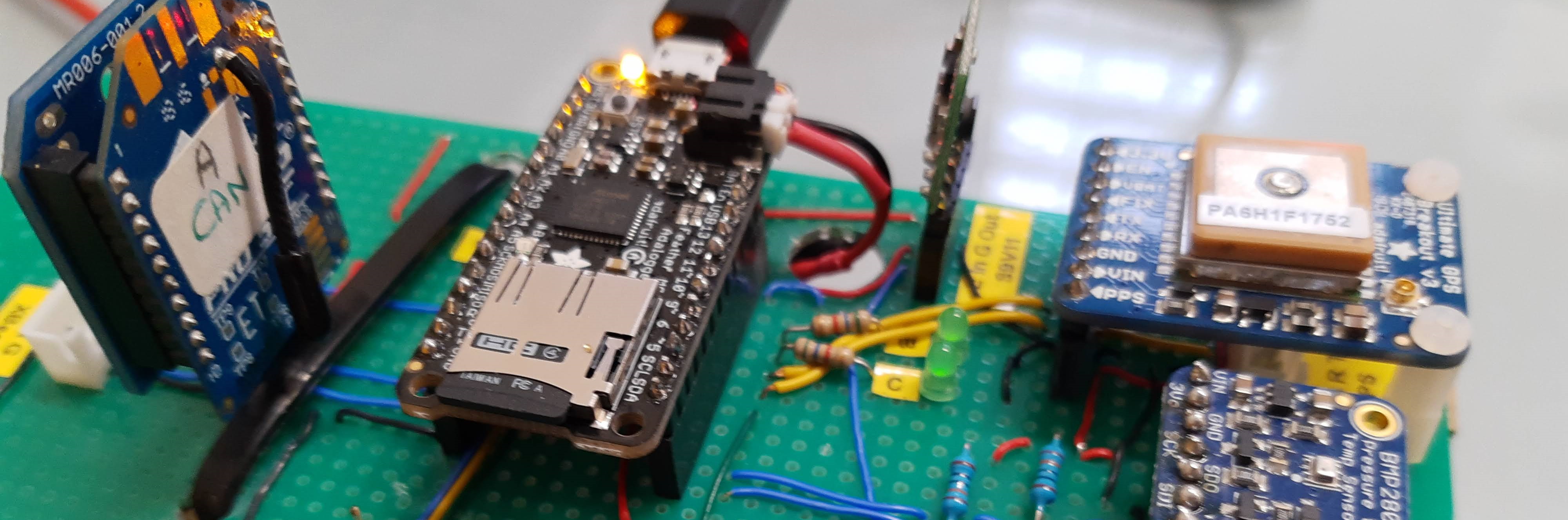
Our CanSat system will include a number of subsystems in order to collect and stored the acquired data:
- The can itself acquires data every 200 msec, stores the data on-board (SD-Card) and transmits it to the RF-Transceiver along with location data (GPS, altitude, velocity…).
- The RF-Transceiver is our ground station: it received and stores the acquired data, and sends it to the RT-Processing. It also sends the commands received from the RT-Commander (not during the flight) to the can;
- The RT-Commander is our system control unit. It receives status information and possibly sends commands before and after the flight;
- The RT-Processing receives acquired data and processes it on the fly.
.png)
Primary mission
Like every other team, we have a primary mission that consists of measuring the air pressure and temperature, and transmitting it via radio to the ground as well as storing it on an SD card. And after the flight, we will generate temperature, altitude and pressure graphs.
More info about the design of our primary mission.
Secondary mission
Our secondary mission is to modify the trajectory of the Cansat by modifying the parachute. Then we print it on our own Zortrax machine.
More info about the design of our secondary mission.
Can design
Our can is 3D printed from a design we develop on Autodesk's Fusion 360 software. This allowed us to efficiently organize the composition of our probe. Inside the main can is a space reserved for the secondary mission. In addition, there is a square window for our GPS module, which needs a view of the sky to receive signals from the probes.
In the upper part of the can, we'll place the control electronics: a controller card, an SD card, a GPS, an XBee module and the mission's primary sensors. The lower part will be used for the secondary mission, a battery and ballast.